





2018-01-04 来源:搜狐网
博世近日宣布,已与国内优秀的地图供应商合作完成了精准定位服务——“博世道路特征(Bosch Road Signature)”在国内道路环境下的可行性验证,推动先进自动驾驶技术本土发展向前迈进关键一步。
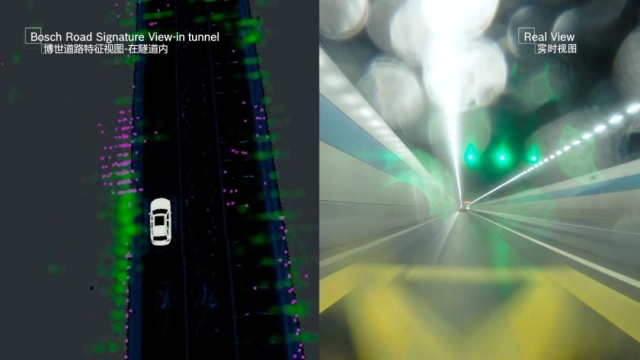
2017年4月,博世底盘控制系统与国内三大地图供应商正式达成合作,将博世道路特征引入中国自动驾驶市场。之后历时八个月,整个验证过程覆盖了大多数典型路况,包括中国苏州中环高架路、中环隧道和阳澄湖大道(城市道路)三种不同路况。通过验证,目前,配备博世道路特征定位功能的高精地图可成功集成于自动驾驶汽车内,并实现精准定位。而针对高速公路路况的测试与验证工作,即将在2018年初与图商开始进行。
“博世道路特征在中国的落地对国内自动驾驶发展来说具有里程碑式的意义,为全天候环境下的精准定位和路线规划提供了最佳的技术解决方案。此次合作的研究成果充分结合了博世在雷达技术应用上的创新及自动驾驶整体解决方案上的丰富技术储备,以及国内图商在地图数据采集和校准上的经验。”博世底盘控制系统中国区总裁陈黎明博士表示:“博世也会将博世道路特征开放给更多的主机厂以及地图供应商,让更多的车辆能够参与到众包当中,以丰富整个高精地图生态系统。”
高鲁棒性、高实时性的道路特征定位功能
博世道路特征基于摄像头和毫米波雷达传感器,适用于全天候环境的可靠定位服务。相比摄像头的单一解决方案,毫米波雷达则具有高鲁棒性,可用于大多数复杂及恶劣的情况,例如雨、雪、雾、背光(如日出、日落)、黑夜、覆盖道路(如被树叶、雪、水等覆盖)等,而不会影响高精定位层的生成和定位。同时毫米波雷达探测距离较远(长距离雷达0-250m),能更早地发现车辆前方定位特征的变化,弥补了摄像头的局限性,为自动驾驶系统争取更充足的反应时间。
在验证过程中,博世采用全球卫星定位系统(GNSS)来协助产生博世道路特征,当在无法接收到GNSS信号的时候(如隧道),则可通过惯性导航(IMU)等其它技术来实现定位。
强强联手,实现实时数据与高精地图的集成
博世与地图供应商的合作主要集中在高精地图及定位解决方案方面,其中定位解决方案是由创新的摄像头定位服务和独特的毫米波雷达定位服务组成。博世道路特征通过众多连接到云端服务器且配备了驾驶员辅助系统的互联车辆,把毫米波雷达及摄像头采集生成的道路特征数据经过处理后上传至云端服务器,从而生成博世道路特征,并与地图供应商的定位参考图层同步校准,继而提供给自动驾驶汽车使用。
在验证过程中,博世与地图供应商就校准标准达成一致,并且整个校准过程经测试也取得了良好效果,可实现精度10厘米以内的定位,不仅对现有高精地图起到补充作用,同时也能对过期路段信息进行更新。在此期间,数据的平均上传大小约为每公里15KB(雷达约5KB,摄像头约10KB)。
未来,通过数以百万计的配备博世摄像头及毫米波雷达的量产车辆,可以实现众包数据采集,定位特征提取,并上传至地图供应商的符合国家安全要求的云端服务器,从而满足高精地图对及时性和低成本性的需求。
 |  |